一套完整的可穿戴手势交互系统,从原始信号采集到用户感知反馈,可抽象为 A–E 五层架构。各层职责清晰、接口标准化,既支持模块化替换(如更换传感模态或识别算法),也便于跨平台移植。
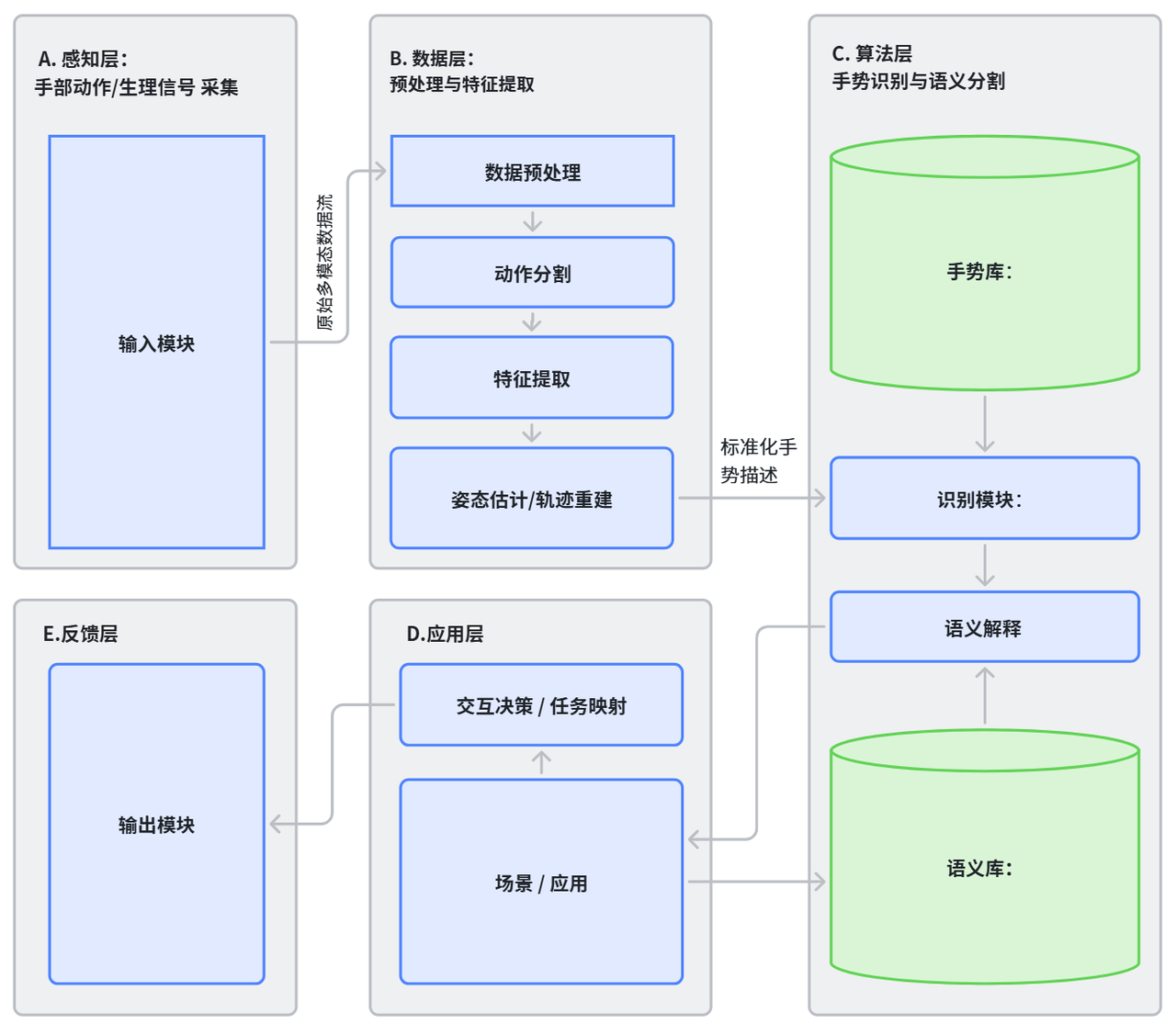
A · 感知层
手部动作 / 生理信号采集
IMU · EMG · 压力/弯曲传感器 · 触摸 · 视觉 · PPG · 超声
感知层负责采集来自可穿戴设备的原始数据流。不同传感模态的组合决定了系统可识别的手势类型与精度上限。单一传感模态(如仅 IMU)适合简单手势集;多模态融合(如 sEMG + IMU)可支持更大规模、更精细的手势词典。
B · 数据层
预处理与特征提取
滤波 · 去噪 · 归一化 · 同步 · 漂移校正 · 窗口分割 · 特征工程
数据层将原始信号转换为可用于识别的标准化描述,包含四步流水线:滤波去噪(消除工频干扰、运动伪影)、归一化(消除传感器个体差异)、时间同步(多模态信号对齐)、窗口分割(生成固定长度分析单元)。
C · 算法层
手势识别与语义分割
手势词典 · 上下文知识库 · 分类/回归模型 · 连续手势分割
算法层是系统的"理解"核心,包含两类知识库(手势词典、场景上下文)和两个处理模块(手势分类/回归、连续手势流分割)。传统机器学习与深度学习方法均在此层部署,选择依据见 2.2 节。
D · 应用层
交互决策 / 任务映射
场景感知 · 意图推断 · 设备配对 · 指令路由 · 多模态融合决策
应用层将识别结果映射为具体的交互指令,体现"把意图变成动作"的过程。核心挑战在于上下文感知:同一手势在不同场景(VR 游戏 vs. 车载控制)应触发不同动作;多设备场景还需结合指向配对(见 2.3 节)确定目标设备。
E · 反馈层
输出模块(闭环)
屏幕提示 · 震动 · 声音 · 光 · 力反馈 → 形成交互闭环
反馈层将应用层决策结果以多通道形式呈现给用户,形成交互闭环。触觉反馈(震动)是可穿戴设备最常用的反馈通道,力反馈则在假肢控制和远程操控场景中提供关键的感知信息。
五层架构的核心价值在于解耦:传感模态的升级(A 层)不影响算法层(C 层);应用场景的扩展(D 层)不需要重新训练识别模型(C 层)。这种模块化设计是可穿戴手势交互系统工程化落地的基础。